

某知名品牌電動汽車,車輛加速至100km/h左右時,存在明顯的嘯叫聲,嘯叫聲是NVH問題的一種類型,影響車輛乘坐的舒適性,車速高于110km/h時嘯叫聲消失,根據(jù)經(jīng)驗判斷是電驅(qū)的軟件控制問題。(NVH是噪聲Noise、振動Vibration、聲振粗糙度Harshness)
01 制定測試方案
測試電機控制的信號,根據(jù)電機控制器的電氣原理圖,制定測試方案,計劃測試以下的信息:
1)測試電壓:總電壓、U相電壓、V相電壓
2)測試電流:U相電流
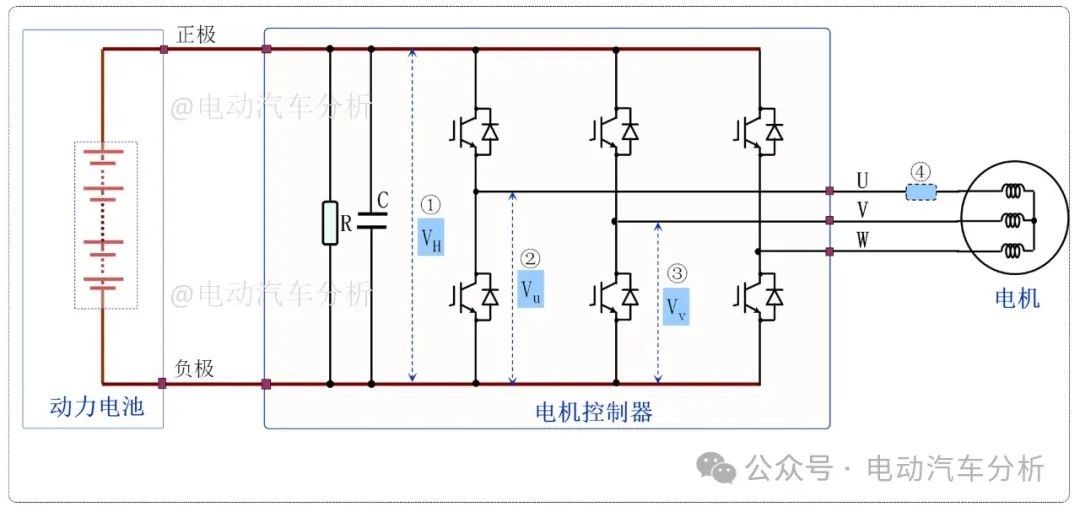
選擇測試儀器,由于測試的電壓最大達到480V,需采用差分探頭。根據(jù)電壓和電流的參數(shù),選擇合適的高壓差分探頭和電流探頭:

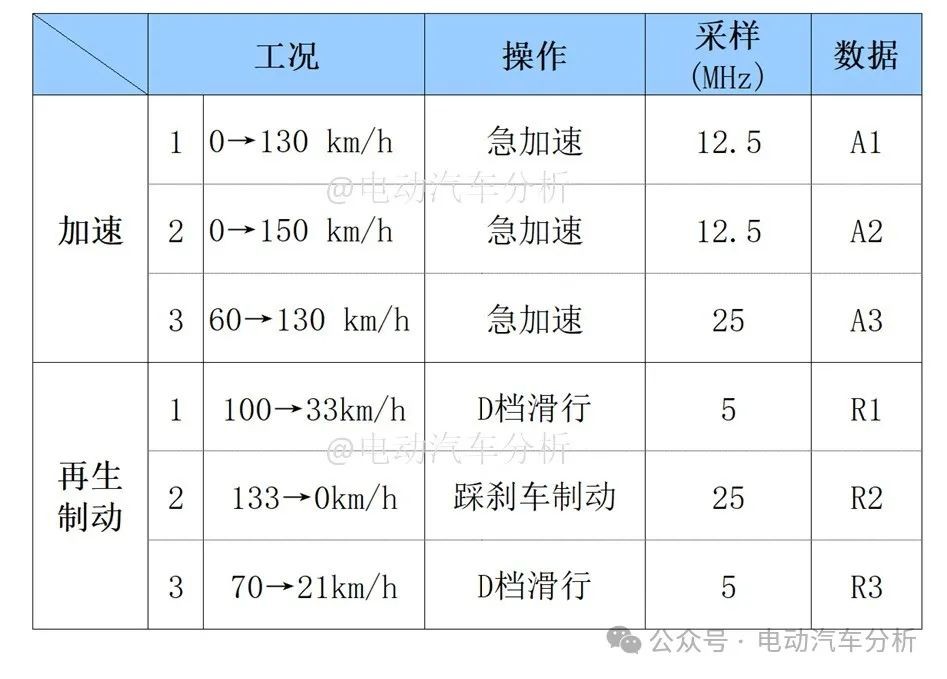
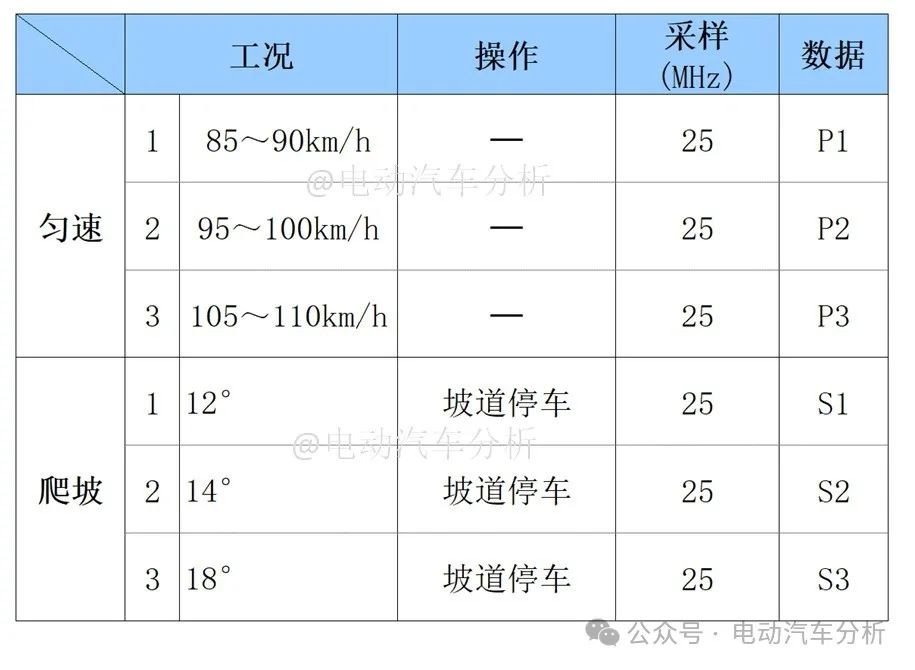
制定測試工況:制定加速、再生制動、勻速、爬坡的測試工況,包含有急加速、滑行、再生制動的駕駛操作,全面覆蓋車輛的使用場景。
根據(jù)測試方案,進行電壓、電流測試的接線:
1)測試電壓:
測試線接電機控制器的電池輸入端,以及U相、V相兩端,接線另一端接電壓差分探頭。
※高電壓測試的接線,車輛需確保下電;(非專業(yè)人員勿效仿)


2)測試電流:
由于高壓線束是帶網(wǎng)狀屏蔽層,需先剝離屏蔽層,再套上電流探
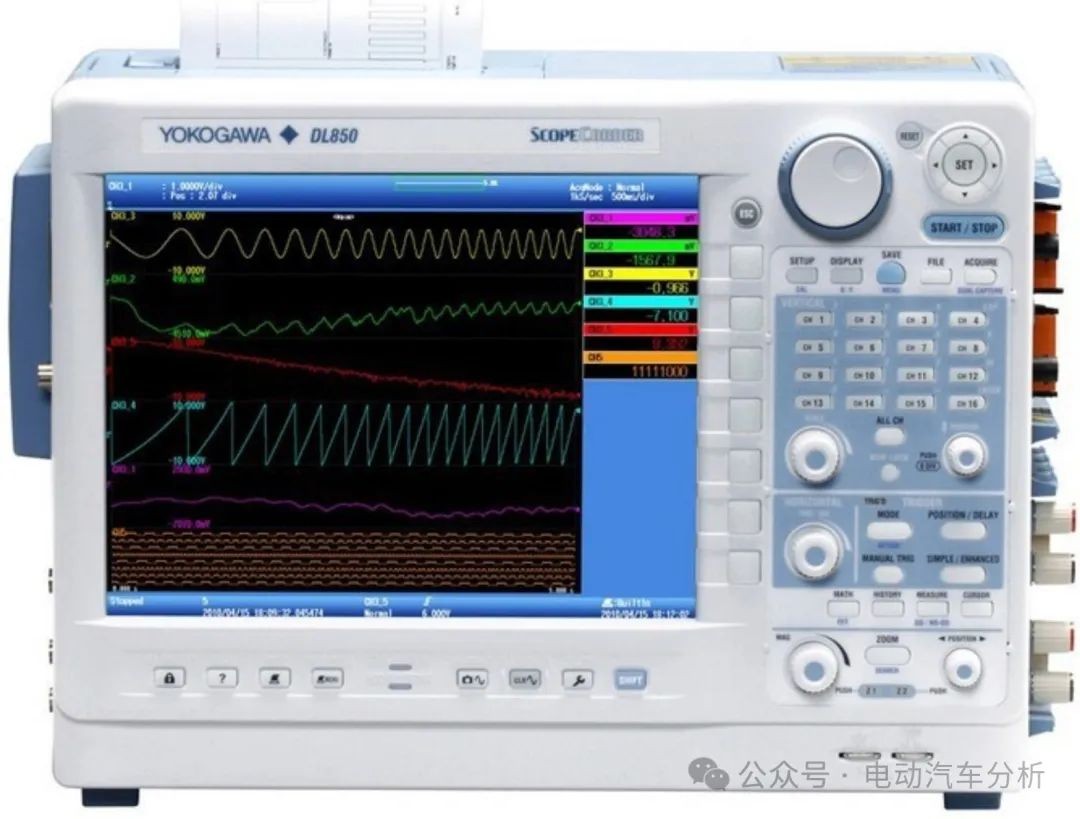
測試的三路電壓信號、一路電流信號,接入示波器,例如, 可以用橫河DL850V
橫河YOKOGAWA示波器很好用。

03 實車測試
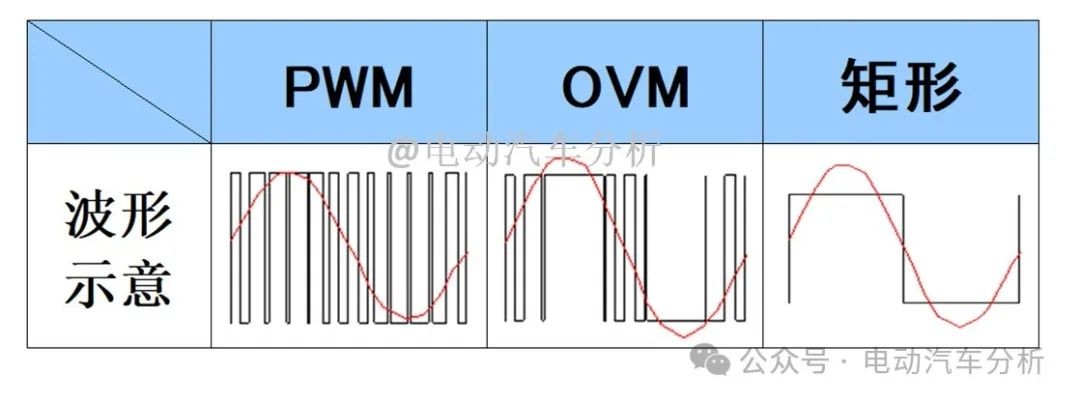
根據(jù)經(jīng)驗,預測電機控制器MCU可能采用的控制方法:
1)PWM正弦波調(diào)制控制
2)OVM超調(diào)波調(diào)制控制
3)矩形波調(diào)制控制
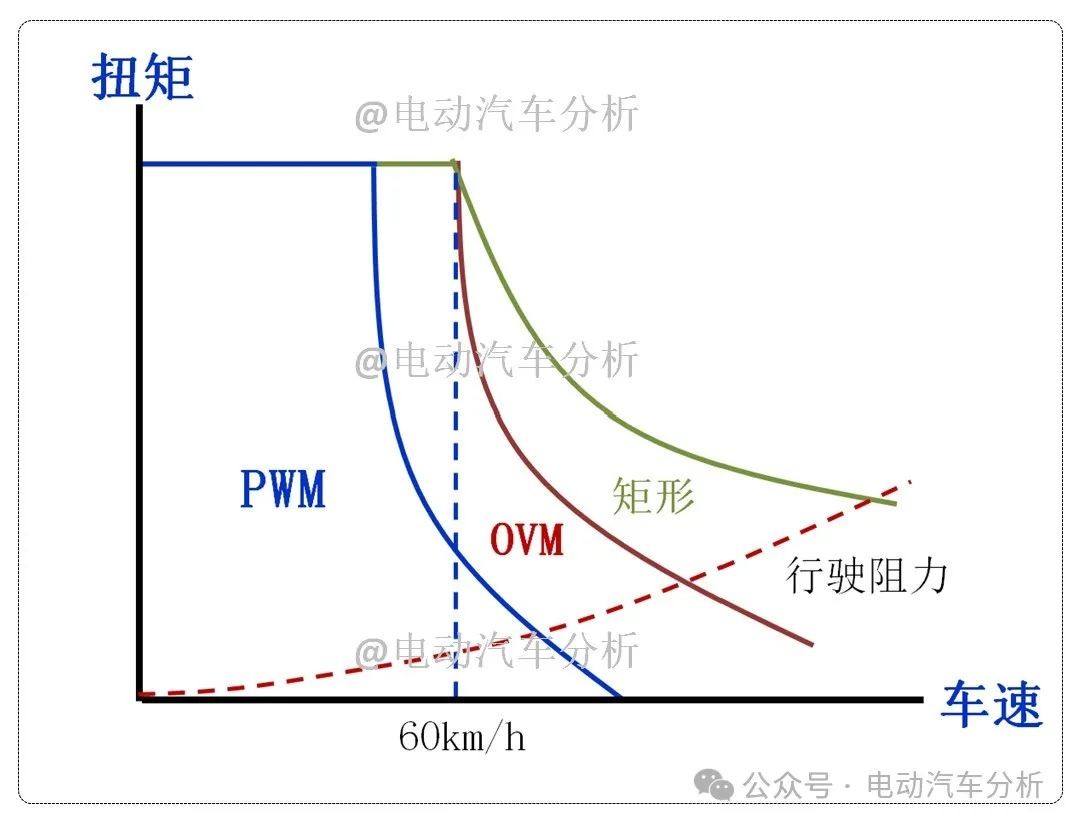
各調(diào)制控制的使用范圍,如下圖所示,低速時采用PWM正弦波調(diào)制,中速時采用OVM超調(diào)波調(diào)制,高速時采用矩形波調(diào)制控制。
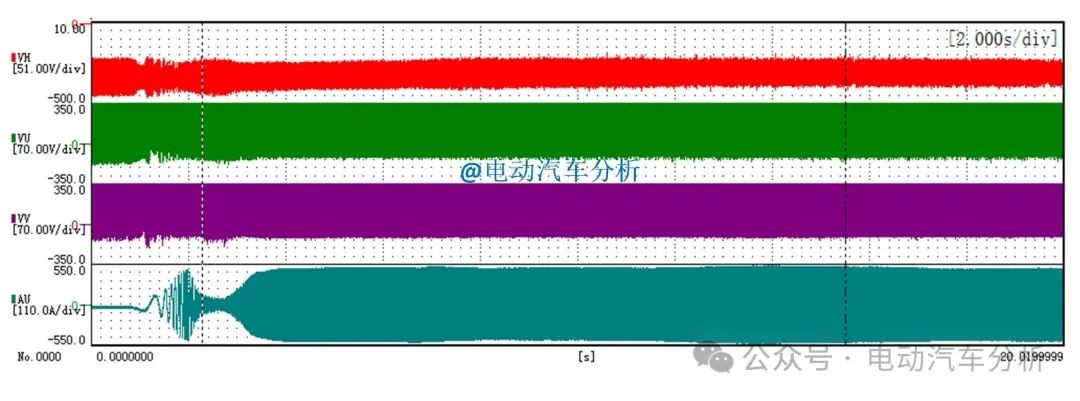
根據(jù)測試方案,分別按加速、再生制動、勻速、爬坡的測試工況,用示波器記錄測試的波形,例如,起步加速至150km/h波形如下圖:
04 分析測試波形
放大示波器各測試點的波形,進行測試信號的分析,如下圖,可以知道控制采用的載波周期為200us,根據(jù)公式f=1/T,可知載波頻率為5kHz。
分析車速90km/h附近時的控制信號,采用的是PWM正弦波調(diào)制。
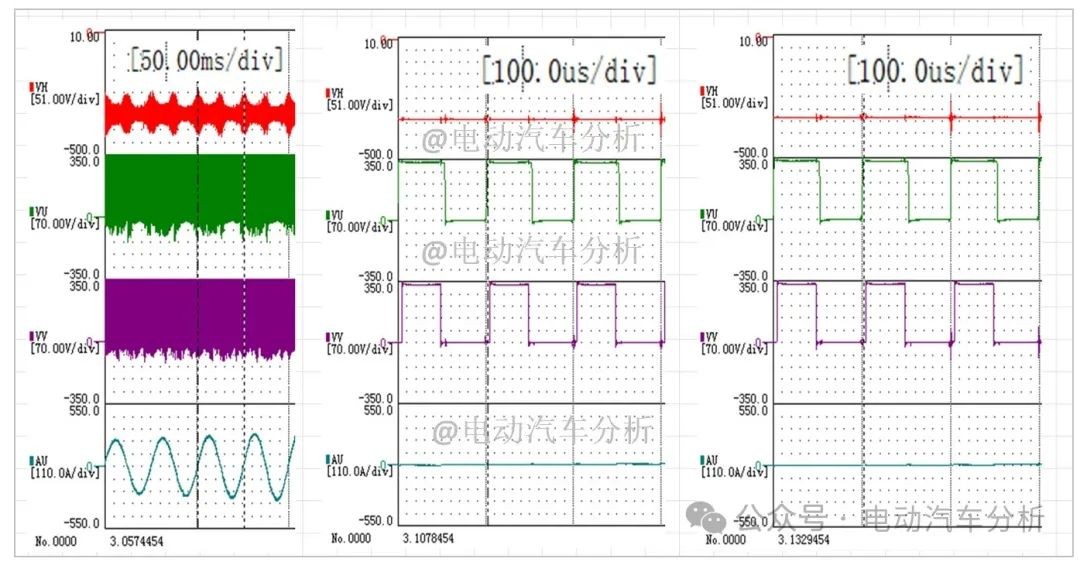
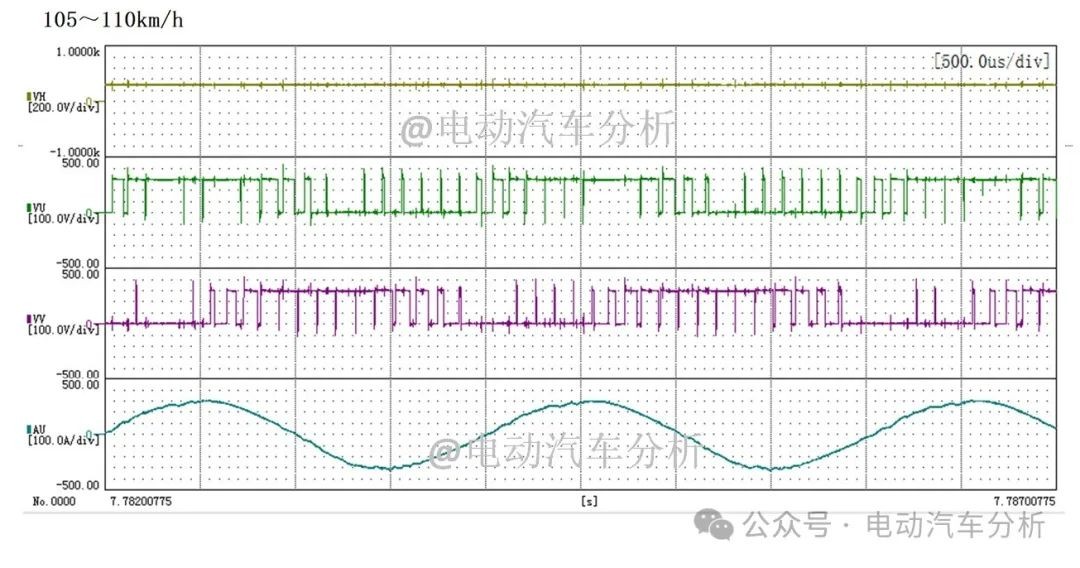
再分析車速105km/h附近的控制信號,從波形看采用的是OVM超調(diào)波調(diào)制。
總結:通過以上的測試分析,可以判斷車速100km/h時出現(xiàn)的嘯叫聲,是電機控制軟件的調(diào)制波形變換的設計問題。